Enhancing your performance
Advanced Control and Performance is all about system control Optimization. We create a control law that will make the system go from its current state to the desired one, considering some project characteristics such as
- constraints on actuators’ capacity,
- desired elapsed time between states,
- handle varying known parameters of the plant, and
- the type of processing unit is available to generate commands.
The control law can utilize one or more classical and modern advanced techniques addressing various problems.
- Proportional-Integral-Derivative (PID) family: well known among professionals, simple and reliable. It is the industry standard for “model-free” control, though variations (like Gain Scheduling) are used when plant behavior changes across different operating points.
- Linear Quadratic Regulator (LQR): useful when minimizing a well-known cost function for the system, representing a trade-off between state evolution and control effort in linear systems.
- Linear Quadratic Gaussian (LQG): enhances LQR by handling a noisy measurement signal using the Kalman Filter (KF).
- Model Predictive Control (MPC): suited for critically constrained systems, and normally involves multivariable interactions.
- Model Predictive Path Integral (MPPI): A sampling-based variation of MPC useful for systems with complex, non-linear dynamics and non-convex costs (like obstacle avoidance). It optimizes by sampling thousands of trajectories rather than relying on gradients.
- Robust Control: handles well model parameter uncertainty and disturbances – well-suited for worst-case scenario performance guarantees.
- Sliding Mode Control (SMC): used when the system has non-linear behavior. Handles parameter variations well, but requires the system to accept a bit of chattering.
- Feedback Linearization: used to simplify a non-linear system model, allowing linear techniques to work on non-linear cases. Requires an accurate non-linear model.
- Adaptive Control: appropriate when the system parameters are unknown or change over time, requiring the controller to update its parameters online to maintain performance.
Tailoring the control law for a specific machine has management and engineering advantages:
- Faults and failures can be actively avoided and predicted, lowering maintenance costs.
- Misestimation of certain parameters can be handled in the control law.
- Enhancing performance characteristics, such as energy consumption, could be a constraint, leading to more efficiency in energy consumption.
- Strategic risk reduction by making the equipment resilient to disturbances.
Control Law Design and Validation Process
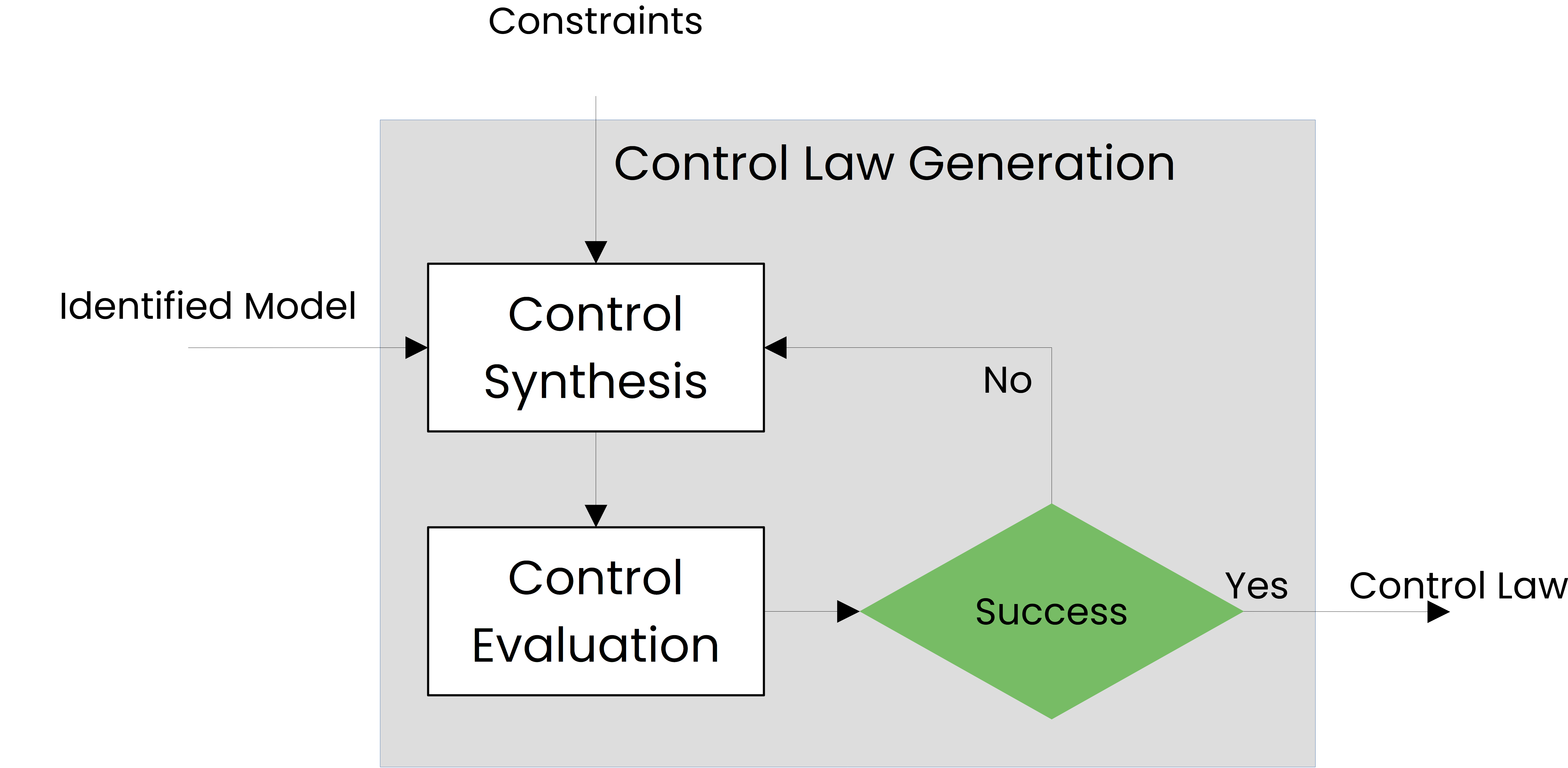
The generic process is shown in Figure 1. We take into account any constraints the target system has, and a model that approximates its behavior.
- Control Synthesis chooses the layout of the control law. There are a myriad of possible structures to choose from; the main guidance will be the constraints in place. It is also at this time that the constraints are analyzed to check if they are feasible or not.
- Control Evaluation experiments within a simulated model of the system, checking if constraints are satisfied.
Success is achieved if constraints are considered satisfied.
Once we have a control law ready and delivered, we can collaborate with the internal team during their integration and test process in the real system.
Conclusion
In summary, advanced control and performance optimization is the systematic activity of driving a system from its current behavior to a desired operating condition while explicitly accounting for constraints, dynamic characteristics, and available computational resources. The control synthesis and evaluation process ensures that candidate control laws are not only mathematically sound but also practically implementable on the target hardware. The result is a tailored control law that aligns with the technical requirements of the application and the operational objectives of the organization, enabling safer, more resilient, and higher-performing industrial systems.